Wprowadzenie
Wypadki utonięć stanowią ogromne nieszczęście, często będące wynikiem ludzkiej niefrasobliwości, zwłaszcza po spożyciu alkoholu. W takich tragicznych przypadkach policja i służby ratownicze straży pożarnej są angażowane do odszukania i wydobycia zwłok. Od wczesnych lat 70. XX wieku systemy sonarów bocznych wykorzystywano do wykrywania zatopionych obiektów, takich jak samoloty, statki czy samochody. Jednak starsze systemy, pracujące na niskich częstotliwościach, nie były w stanie wykrywać zatopionych ludzkich ciał. Współczesne sonary boczne i skanujące, charakteryzujące się wysoką częstotliwością i rozdzielczością, znalazły szerokie zastosowanie w poszukiwaniu ofiar utonięć.
Kwestie Wstępne w Poszukiwaniach Hydroakustycznych
Poszukiwanie ciała ludzkiego metodami hydroakustycznymi jest zadaniem skomplikowanym ze względu na małe rozmiary celu oraz jego słabą zdolność do odbicia echa akustycznego. Te wyzwania ograniczają wybór efektywnego sprzętu sonarowego. Przed rozpoczęciem poszukiwań należy rozważyć kilka kluczowych czynników:
1. Wielkość Ciała i Ubiór Ofiary
Aby ustawić optymalny zakres skali sonaru, należy określić przybliżoną wielkość ciała ofiary. Dorosła osoba w warunkach słabego odbicia akustycznego (np. na miękkim mule) może być wykryta z odległości 50 metrów. W przypadku poszukiwania małego dziecka wymagany jest krótszy zakres. Należy zakładać, że najmniejszym wymiarem celu będzie szerokość ramion. Pozostałości szkieletu są ekstremalnie trudne do wykrycia akustycznego. Informacja o ubiorze ofiary jest również istotna; elementy takie jak buty robocze, ubrania z ciężkich materiałów czy kamizelki ratunkowe (PFD) lepiej odbijają ultradźwięki.
2. Potwierdzenie Utonięcia
Prowadzenie poszukiwań podwodnych jest bardzo kosztowne, dlatego kluczowe jest potwierdzenie, że doszło do utonięcia.
3. Wielkość Obszaru Poszukiwań
Znajomość wielkości obszaru poszukiwań jest niezbędna do opracowania programu prac terenowych. Obszar ten powinien być podzielony na rejon poszukiwań podstawowych i drugoplanowych. Wielkość tych rejonów zależy od czynników takich jak zdarzenia z przeszłości, warunki pogodowe (wiatr), poziom wody, informacje o prądach wodnych, granice geograficzne oraz liczba naocznych świadków. Poszukiwania sonarowe są czasochłonne i kosztowne, dlatego precyzyjne zdefiniowanie obszarów i form poszukiwań może przyspieszyć prace. Należy pytać świadków o szacowaną odległość obszaru poszukiwań od brzegu.
4. Głębokość Akwenu
Dla holowanego sonaru bocznego długość stosowanego kabla jest uzależniona od głębokości akwenu i szybkości holowania. Zaleca się korzystanie z map hydrograficznych do oceny głębokości. W przypadku braku takich danych, przed użyciem sonaru holowanego należy dokonać pomiaru głębokości echosondą lub linką sondażową wzdłuż planowanej trasy holowania. Optymalna prędkość holowania bocznego sonaru wynosi 2-5 węzłów. Długość kabla powinna być około 3-4 razy większa od maksymalnej głębokości wody. W przypadku stosowania windy kablowej, można wykorzystać depresor, aby skrócić zasięg kabla, jednak nie zaleca się tego przy ręcznym wydawaniu kabla. Ważne jest uwzględnienie lokalnych warunków geologicznych i topograficznych, a także stosunku części kabla wydawanego do wybieranego, zależnie od stromości zboczy.
W przypadku sonaru skanującego (z kablem opuszczanym do wody), długość kabla powinna przekraczać maksymalną głębokość akwenu o około 20-30%, umożliwiając regulację z pokładu łodzi.
5. Topografia Dna
Znajomość topografii dna jest kluczowa. Na płaskim, mulistym dnie sonar akustyczny stosunkowo łatwo wyszukuje ciało ofiary. Na dnie pokrytym skałami, otoczakami, pniami drzew lub gruzem, wykrycie ciała sonarem skanującym jest znacznie trudniejsze. W takich sytuacjach może być konieczna kombinacja pojazdu ROV z sonarem lub bezpośrednie zaangażowanie nurka z sonarem.
6. Warunki Lokalne
Należy zrozumieć czynniki, które mogą zakłócać operację poszukiwawczą:
- Kierunki prądów wodnych / pływy
- Geometria linii brzegowej
- Kierunki wiatru
- Wysokość fal
- Lokalny ruch statków lub łodzi
- Dostępność brzegu
Pozyskanie tych informacji przed wyruszeniem w teren pozwoli na odpowiedni dobór sprzętu.
7. Dostępność Wsparcia Logistycznego w Terenie
Możliwości lokalnego wsparcia logistycznego determinują wielkość sprzętu, jaki należy wysłać w rejon prac poszukiwawczych.
Potrzeby Nawigacyjne
Dane sonarowe mają niewielkie znaczenie bez korelacji z informacjami o współrzędnych geograficznych lub systemie względnej siatki geodezyjnej. Dlatego dokładny system nawigacyjny jest istotnym elementem każdego systemu sonarowego. Idealny system nawigacyjny pozwala na poszukiwania niezależnie od personelu i sprzętu lądowego, umożliwiając precyzyjne, powtarzalne i częste aktualizowanie pozycji.
Wymagana Dokładność do Ponownego Ustalenia Pozycji Celu
Pozycję celu można dokładnie obliczyć na podstawie danych z bocznego sonaru holowanego lub sonaru skanującego. Jednakże, dokładne określenie pozycji głowic lub pojazdu ROV jest często trudne. W przypadku bocznego sonaru holowanego, ilość wydanego kabla i dokładność pozycji jednostki pływającej wpływają na precyzję lokalizacji głowicy. Dokładność obliczenia pozycji geograficznej celu względem głowicy sonaru holowanego jest efektem kombinacji dokładności danych nawigacyjnych i pomiaru położenia kabla.
Określenie pozycji geograficznej opuszczonej głowicy sonaru skanującego lub trójnogu z głowicą jest łatwiejsze, ponieważ antena odbiornika nawigacyjnego może być umieszczona dokładnie nad punktem opuszczenia głowicy.
Boczny sonar holowany jest doskonałym narzędziem do przeszukiwania i określania charakteru dna dużych obszarów morskich. Z kolei sonar skanujący jest niezastąpiony przy naprowadzaniu nurków na cel oraz przy poszukiwaniach na obszarach o niejednorodnym, ciasnym ukształtowaniu, gdy wymagana jest dokładna znajomość pozycji.
Niezależnie od rodzaju sonaru, następnym krokiem po lokalizacji obiektu jest jego identyfikacja poprzez potwierdzenie wizualne. Możliwość wizualnego zlokalizowania obiektu przez płetwonurka zależy od dokładności określenia pozycji podczas operacji poszukiwania przy użyciu sonaru. Określenie pozycji geograficznej zlokalizowanego obiektu jest łatwiejsze przy zastosowaniu sonaru skanującego.
Należy pamiętać, że poszukiwania na głębokiej wodzie są kosztowne, a wizualna weryfikacja obiektu utrudniona. Dryf i prądy wodne mogą powodować znaczne odstępstwa od kalkulowanej pozycji głowicy sonaru holowanego względem jednostki holującej. Dokładne pozycjonowanie głowicy sonaru holowanego może wymagać dodatkowego systemu podwodnej nawigacji akustycznej.
Odległość Obszaru Poszukiwań od Brzegu
Odległość obszaru poszukiwań od brzegu oraz jego wielkość wpływają na wybór metod i rodzaju sprzętu nawigacyjnego. Operacje w strefie przybrzeżnej mogą być realizowane przy użyciu różnorodnego sprzętu. Różnicowy GPS (DGPS) zapewnia autonomię nawigacyjną statku operującego poza strefą przybrzeżną i jest teoretycznie bardzo dokładny. Problemy w stosowaniu DGPS mogą wynikać z ograniczonego pokrycia satelitów i niskiego poziomu sygnału różnicowego.
Prosty system GPS nie oferuje takiej dokładności jak DGPS. Systemy nawigacyjne ze stacją bazową na lądzie, mierzące kąt i odległość do statku, są bardzo dokładne. Wykorzystują one wiązki laserowe lub podczerwieni do śledzenia trasy statku i mogą być stosowane w miejscach, gdzie DGPS jest niemożliwy (np. wokół mostów lub dźwigów portowych). Dane o pozycji przekazywane są do komputera statkowego przez łącze radiowe w paśmie UKF. Systemy te mają jednak ograniczony zasięg do około 5 km w dobrych warunkach.
Wielkość Celu
Wielkość celu ma istotne znaczenie przy wyborze zakresu skali sonaru, dlatego ważna jest również tolerancja dokładności wykorzystywanego systemu nawigacyjnego. Jeśli do wyznaczenia obiektu wymagany jest mały zakres skali, system nawigacyjny powinien mieć węższy zakres dokładności niż wybrany zakres skali. Wielkość celu wpływa także na planowaną wielkość zachodzenia na siebie pasów poszukiwań między sąsiednimi trasami statku.
Koszt i Dostępność Wyposażenia
Bardziej wyspecjalizowane systemy nawigacyjne zazwyczaj wiążą się z większym kosztem sprzętu i jego obsługi. Należy pamiętać, że nawigacja jest kluczowym elementem poszukiwań, niezależnie od rodzaju używanego sonaru.
Modele i Metody Poszukiwań
Warunki dna, wielkość obszaru poszukiwań oraz typ sprzętu wpływają przede wszystkim na wybór modelu poszukiwań.
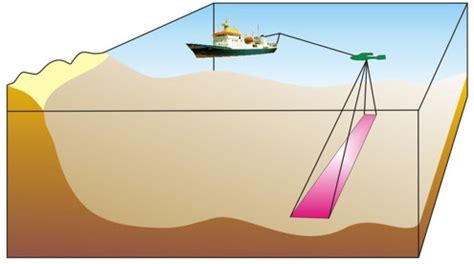
Sonar Boczny Holowany
Ponieważ sonar boczny powinien być holowany tuż nad dnem, operatorzy muszą być świadomi ryzyka uderzenia głowicą o dno. Utrata głowicy to nie tylko koszt, ale także opóźnienie w poszukiwaniach. Operator systemu jest odpowiedzialny za sprzęt i powinien poinformować uczestników poszukiwań o wymaganiach związanych z jego obsługą. Cały program poszukiwań i identyfikacji przy użyciu sonaru bocznego jest często ustalany i realizowany przez operatora sprzętu.
W przypadku wyczarterowania statku do poszukiwań, załoga rzadko ma doświadczenie w operowaniu sonarem holowanym. Nawigator świadczący usługi zwykle rozumie wymagania, ale oczekuje od operatora koordynacji procesu poszukiwań.
Wskazówki do Zapamiętania
- Uzupełnienie programu we wcześniej zaplanowane marszruty: Nawigator powinien nanieść plan tras na siatkę współrzędnych, aby pokryć cały obszar poszukiwań, uwzględniając dostateczne zakładki sąsiednich tras. Rozmiar celu wpływa na wybór największej skali zakresu, natomiast lokalne warunki geologiczne i głębokość wody wpływają na dobór kierunków planowania marszrut oraz odległości między nimi.
- Pozyskiwanie danych z sonaru holowanego przy stałej prędkości: Zazwyczaj 2-5 węzłów.
- Wymaganie od sternika, aby nigdy nie schodził z kursu bez uprzedzenia operatora: Jest to szczególnie ważne przy dłuższym kablu. Głowica sonaru zachowuje się jak holowany narciarz wodny - gwałtowne skręty łodzi powodują luzowanie liny i potencjalne "wywrotki" głowicy.
- Instruowanie sternika o zbliżaniu się innego statku, zmianie stanu morza, potencjalnych niebezpieczeństwach (sieci, pływaki, pułapki, liny kotwiczne, rafy itp.) oraz wszelkich innych czynnikach mogących mieć wpływ na operacje.
- Prośba o nieużywanie nadajnika radiostacji statkowej: Może to spowodować zakłócenia w rejestracji danych sonarowych.
- Wymaganie wcześniejszej informacji o zbliżaniu się do punktu startowego poszukiwań: Umożliwi to wydanie głowicy sonaru do wody. Na głębszej wodzie wydanie głowicy może zająć kilkanaście minut.
- Opisywanie kopii na twardym dysku: Należy uwzględnić numer linii, namiar (kurs), numer pozycji.
- Uważanie na zmiany geologiczne podwodnych wzniesień, szczególnie przy holowaniu blisko dna.
- Stosowanie metody wybierania kabla przy rejestracji danych sonarowych, gdy marszruty są zorientowane od strony morza w kierunku lądu.
- Oznaczanie odcinków kabla sonaru holowanego (wydawanego ręcznie) co regularną odległość przy pomocy taśmy samoprzylepnej do oceny długości wydanego kabla. Automatyczne liczniki ilości wydanego kabla są montowane na windach kablowych, niektóre z nich umożliwiają przekazywanie informacji o długości do komputera nawigacyjnego.
Typowe zastosowanie bocznych sonarów holowanych ma miejsce przy poszukiwaniu ofiar katastrof morskich lub lotniczych.
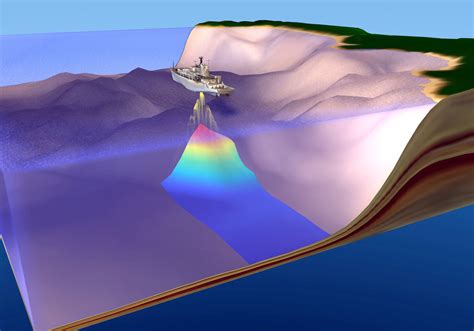
Sonar Skanujący w Konfiguracji Opuszczanej nad Dno
Sonar skanujący w konfiguracji opuszczanej nad dno jest prostym, ale efektywnym sposobem poszukiwań z użyciem małej łodzi lub poprzez przerębel w pokrywie lodowej. Odbiornik DGPS zamontowany powyżej punktu opuszczenia głowicy sonaru określi pozycję we współrzędnych geograficznych, eliminując potrzebę dodatkowej kalkulacji pozycji głowicy, jak w przypadku sonaru holowanego.
Przy stosunkowo małych obszarach poszukiwań (zazwyczaj około 1 km²), bardzo przydatne jest stosowanie trójnogu do opuszczania głowicy sonaru nad dnem. Zastosowanie trójnogu zapewnia stabilne zawieszenie głowicy, eliminując efekty myszkowania czy falowania, które mogą wystąpić przy zawieszaniu głowicy na samym kablu. Sonar na trójnogu wymaga przegubowego zawieszenia, aby zachować pionową pozycję przy nierównym lub pochyłym dnie.
Punkt osadzenia trójnogu na dnie jest określony współrzędnymi podanymi przez DGPS. Posadowienie trójnogu na dnie zapewnia operatora, że głowica nie będzie się przemieszczać po dnie i nie ma potrzeby wydawania więcej kabla.
Jeśli stelaż jest wyposażony w "chorągiewkę", w konfiguracji opuszczanej głowica sonaru skanującego zawsze ustawi się samoczynnie zgodnie z prądem wody. Ważne jest jednak utrzymywanie łodzi w ustalonej pozycji podczas procesu skanowania. Schemat poszukiwań to szereg zachodzących na siebie skanów biegunowych. Należy sporządzić odwzorowanie schematu na papierze, zaznaczając zakres i kierunek skanowań, aby wykryć potencjalny obiekt.
Rola Innych Służb w Poszukiwaniach
Inne służby, takie jak Państwowa Straż Pożarna (PSP) oraz GOPR, TOPR, WOPR, nie prowadzą formalnie poszukiwań osób zaginionych w celu ich odnalezienia lub ustalenia miejsca pobytu. Ich rolą jest prowadzenie akcji ratowniczych na wskazanym obszarze w celu ratowania życia lub zdrowia ludzi. Zgodnie z ustawą o Państwowej Straży Pożarnej, PSP odpowiada za organizowanie i prowadzenie akcji ratowniczych w czasie pożarów, klęsk żywiołowych lub likwidacji miejscowych zagrożeń, wykorzystując w tym celu również zwierzęta.
Specjalistyczne Grupy Poszukiwawczo-Ratownicze PSP
W ramach przygotowania do reagowania na zdarzenia wymagające użycia specjalistycznego sprzętu, PSP dysponuje sześcioma specjalistycznymi grupami poszukiwawczo-ratowniczymi (SGPR). Grupy te są zlokalizowane w Warszawie, Łodzi, Poznaniu, Gdańsku, Nowym Sączu i Jastrzębiu-Zdroju. Mogą one szybko podjąć działania na terenie kraju i poza jego granicami, głównie w celu ratowania osób uwięzionych pod zawalonymi lub zniszczonymi konstrukcjami budynków.
W sytuacjach, gdy położenie osób uwięzionych nie jest znane, do lokalizacji wykorzystuje się specjalistyczny sprzęt techniczny, taki jak kamery wziernikowe, geofony oraz psy ratownicze. PSP szkoli przewodników psów ratowniczych oraz psy w specjalności gruzowiskowej i terenowej.
Ochotnicze Straże Pożarne (OSP)
W kraju funkcjonuje również wiele ochotniczych straży pożarnych, które posiadają psy ratownicze do działań na gruzowiskach. Możliwe jest skierowanie do działań ratowników oraz psów ratowniczych z tych jednostek, pod warunkiem podpisania porozumień z komendantami PSP.
Finansowanie Działań
Finansowanie SGPR PSP odbywa się z budżetu właściwej komendy powiatowej (miejskiej) PSP, z możliwością pozyskiwania środków z innych źródeł pozabudżetowych. W ramach Krajowego Systemu Ratowniczo-Gaśniczego (KSRG) przeznacza się środki na utrzymanie gotowości bojowej jednostek OSP oraz zakup sprzętu. Dodatkowa kwota przeznaczona jest na jednostki OSP ratownictwa specjalistycznego.
Rola Policji w Poszukiwaniach
W przypadku zaginięcia osoby i nieznajomości jej precyzyjnej lokalizacji, służbą właściwą do organizacji działań poszukiwawczych jest Policja. Policja, jako organizator działań, odpowiada za dobór właściwych sił i środków oraz ewentualne wezwanie dodatkowej pomocy. W sytuacji, gdy do działań zostają wezwane siły PSP lub OSP, są one podporządkowane dowódcy z Policji.
Wybór metody poszukiwania osoby zaginionej zależy od konkretnej sprawy i nie można z góry wskazać jednej, najskuteczniejszej metody. Od skuteczności działań Policji zależy powodzenie poszukiwań.
Centrum Poszukiwań Osób Zaginionych (CPOZ)
Od 15 lutego 2013 r. w ramach Wydziału Poszukiwań i Identyfikacji Osób Biura Kryminalnego Komendy Głównej Policji funkcjonuje Centrum Poszukiwań Osób Zaginionych (CPOZ). Jest to wyspecjalizowana komórka odpowiedzialna za koordynację, analizę i nadzór nad najtrudniejszymi poszukiwaniami osób zaginionych na terenie całego kraju.
CPOZ wykonuje zadania na rzecz jednostek Policji prowadzących poszukiwania, porównując zdjęcia i dane z krajowego systemu informacji policyjnej w celu identyfikacji osób zaginionych, ujawnionych nieznanych zwłok i osób. Centrum tworzy również bazę osób małoletnich stale uciekających i stanowi punkt kontaktowy do wymiany informacji z międzynarodowymi jednostkami do spraw zaginięć oraz polskimi instytucjami i podmiotami pozarządowymi (np. Fundacja ITAKA).
Child Abduction Alert System
System alarmowy stworzony w celu uruchomienia zorganizowanej i natychmiastowej akcji poszukiwawczej w przypadku uprowadzenia dziecka. Rada UE zaleciła wprowadzenie tego systemu we wszystkich państwach członkowskich i nawiązanie współpracy w związku z uprowadzeniami dzieci w strefach przygranicznych.
Poszukiwania w Pomieszczeniach
Przeszukiwanie pomieszczeń jest jedną z kluczowych czynności strażaków podczas pożarów wewnętrznych. Ze względu na ograniczoną widoczność lub jej brak, działania te są złożone i wymagają stosowania sprawdzonych technik.
Techniki Przeszukiwania
Techniki te dotyczą sytuacji, w których widoczność jest bardzo ograniczona lub zerowa. Przy częściowej widoczności przeszukanie jest łatwiejsze i szybsze.
- Przeszukiwanie bez linii gaśniczej: Stosowane jako ostateczność, w okolicznościach, których nie można było uniknąć. Pomaga w sytuacjach krytycznych i w utrzymaniu orientacji.
- Przeszukiwanie z wykorzystaniem liny poszukiwawczej lub bez dodatkowych przyrządów: Zależne od dostępności sprzętu.
Decyzję o wyborze metody podejmuje dowódca na miejscu zdarzenia, oceniając sytuację i potencjalne zyski i straty.
Ogólne Zasady Przeszukiwania Pomieszczeń
- Cel: Odnalezienie osób poszkodowanych w przestrzeniach zadymionych. Po odnalezieniu poszkodowanego, decyzja o dalszym postępowaniu (ewakuacja przez rotę odnajdującą, kontynuacja działań gaśniczych przez inną rotę, ewakuacja przez jednego strażaka) zależy od liczebności sił i środków oraz warunków pożarowych.
- Metodyka działania: Działania wewnętrzne powinny rozpocząć się od dokładnego przeszukania zasadniczego. Strażacy nie mogą zapominać o bieżącej sytuacji pożarowej. W niektórych departamentach straży (np. w Sydney) wysyłane są co najmniej dwie roty: gaśnicza i poszukiwawcza, obie z liniami gaśniczymi, ale o różnych celach. Rota gaśnicza nigdy nie ignoruje poszkodowanego, a rota poszukiwawcza nigdy nie ignoruje pożaru. Szybkie ugaszenie pożaru poprawia warunki temperaturowe, widoczność i stężenie gazów.
- Filozofia pola kukurydzy: W trudnych decyzjach lub przy ograniczonych siłach, priorytetem powinno być ugaszenie pożaru. Przeszukiwanie bez próby gaszenia wiąże się z działaniem w trudniejszych warunkach, przy ciągłym zagrożeniu.
- Przeszukiwanie sprawdzające: Po zakończeniu działań, należy ponownie, metodycznie sprawdzić wszystkie miejsca objęte działaniami oraz ich sąsiedztwo.
Utrzymanie Orientacji
Wysiłki w celu utrzymania orientacji powinny rozpocząć się jeszcze przed wejściem do obiektu, podczas rozpoznania cech budynku (typ budynku, gabaryty zewnętrzne, rozkład okien, kształt, liczba kondygnacji). Może to dać wyobrażenie o wielkości pomieszczeń i trudnościach w przemieszczaniu się.
Sposób i Metoda Przeszukiwania
- Sposób odnosi się do dostępności sprzętu (np. z kamerą termowizyjną, bez niej, z linką, bez przyrządów).
- Metoda to przyjęta kolejność postępowania:
- Metoda prawej i lewej ręki: Po wejściu strażacy kierują się wzdłuż ścian z wybranej strony, kontynuując tę metodę pracy do końca.
- Metoda wybiórcza: Stosowana, gdy istnieją informacje o lokalizacji poszkodowanego lub pożaru, w celu jak najszybszego sprawdzenia tych miejsc. W przypadku nieodnalezienia, zaleca się kontynuację jedną z pozostałych metod.
Podczas przeszukiwania należy w myślach szkicować mapę pomieszczeń, zapamiętywać cechy charakterystyczne wnętrz i oznaczać przeszukane pomieszczenia (np. znakiem na framudze).
Skanowanie Podłogi
Skanowanie pomieszczenia przy podłodze pozwala na zidentyfikowanie jego wielkości, konfiguracji, mebli, obecności poszkodowanych na podłodze oraz innych istotnych elementów. Czynność tę wykonuje przodownik, podczas gdy pomocnik przejmuje na chwilę linię gaśniczą. Ewakuacja poszkodowanego w trakcie przeszukania wymaga powrotu do pomieszczenia i dokończenia sprawdzania. Skanowanie podłogi jest ważne również przy użyciu kamery termowizyjnej, ponieważ pozwala dostrzec obiekty niewidoczne z wyższego poziomu.
Sprawdzenie za Drzwiami
Po wstępnym przeszukaniu, pomocnik sprawdza obszar za drzwiami, aby wykluczyć obecność wnęk, zagłębień lub poszkodowanych. Następnie drzwi są unieruchamiane za pomocą narzędzia lub klina, zabezpieczając drogę odwrotu i oznakowując drzwi wejścia jako wyjścia.

Dalszego przeszukania nie należy wykonywać za pomocą narzędzi, aby uniknąć przypadkowego uderzenia osoby poszkodowanej.
Ćwiczenia i Szkolenia
Pierwszy weekend sierpnia był czasem intensywnego szkolenia wewnętrznego z Grupą Ratownictwa Specjalistycznego Search and Rescue Poland, poświęconego teoretycznym i praktycznym technikom oraz taktykom terenowych poszukiwań. Szkolenie obejmowało egzamin dla stażystów z nawigacji GPS, wykład dotyczący prawnych aspektów poszukiwań osób zaginionych, schemat przebiegu akcji poszukiwawczej oraz znaczenie sensoryki poszukiwawczej.
Poszukiwania Nocne
Po wykładzie przeprowadzono nocne poszukiwania, poprzedzone zajęciami z praktyki poruszania się zespołów w terenie w warunkach nocnych. Duży nacisk położono na odprawę wizualną, niezbędną dla patroli poruszających się w terenie. Wyniki poszukiwań w sektorach z użyciem STP (Systemu Terenowego Poszukiwań) uznano za bardzo dobre, z efektywnością przeszukania sięgającą 75%.
Poszukiwania Dzienne i Wykorzystanie Psa Ratowniczego
W sobotni poranek przeprowadzono przeszukanie sektorów "szybką trójką" (STP) w warunkach dziennych, porównując średni maksymalny zakres detekcji (AMDR) i identyfikacji do warunków nocnych. Kolejnym etapem było wykorzystanie psa ratowniczego w trudnym terenowo sektorze, z utrudnieniami w postaci wysokiej temperatury.

Podsumowanie i Dalsze Szkolenia
Szkolenie zakończyło się podsumowaniem dotychczasowych zadań, omówieniem działań terenowych i analizą własnych przejść uczestników. Dzień zakończono wspólnym ogniskiem. Ostatni dzień szkolenia obejmował omówienie tyraliery i wykorzystania quada w poszukiwaniach, a także praktyczne ćwiczenia z tymi technikami. Psy ratownicze zmierzyły się z pozorantem ukrytym na drzewie, a chętni mogli doświadczyć transportu w przyczepce za quadem.
Szkolenia i doskonalenie umiejętności są kluczowe dla rozwoju ratownictwa.